Pedal Feedback
- Thread starter TrueScotsman
- Start date
I'd just recommend that everybody learns how to brake properly. That will solve 90% of problems (since pedal feedback is really felt only under braking - as far as my experience shows).
Let's imagine we would rotate standard rear wheel so that casette would touch left dropouts and brake rotor end would face the right hand dropouts. And somehow we would mount crankset and chain on left side so it would be just a mirror image of a standard situation. If you then pushed your bike forward the rear wheel rotation would make sprocket rotate as well, sprocket would be like fixie without freewheel, and this is without pedalling. So, bike moving forward would still drive chain, that's why gearbox's freewheel would be needed to isolate spinning secondary chain from primary chain . If you pushed the bike rearward the wheel would rotate but sprocket wouldn't thanks to the rotated freewheel in the hub. No induced rotation on rear sprocket means less chain pull from front chainring and pedal-kickback formula used in Linkage would consist of only gearing differences.
Well, or maybe I'm terribly missing something") , but I don't think so.
, but I don't think so.
Well, or maybe I'm terribly missing something
, but I don't think so.
Last edited:
Let's imagine we would rotate standard rear wheel so that casette would touch left dropouts and brake rotor end would face the right hand dropouts. And somehow we would mount crankset and chain on left side so it would be just a mirror image of a standard situation. If you then pushed your bike forward the rear wheel rotation would make sprocket rotate as well, sprocket would be like fixie without freewheel, and this is without pedalling. So, bike moving forward would still drive chain, that's why gearbox's freewheel would be needed to isolate spinning secondary chain from primary chain . If you pushed the bike rearward the wheel would rotate but sprocket wouldn't thanks to the rotated freewheel in the hub. No induced rotation on rear sprocket means less chain pull from front chainring and pedal-kickback formula used in Linkage would consist of only gearing differences.
Well, or maybe I'm terribly missing something
fluider- pushing the bike rearward is the same as driving it forward- therefore the freewheel would spin then pedalling.
Sorry!
Last edited:
Anyone any further thoughts on this?Sorry Vrock i was meaning my sketches/doodles.
Time for another sketch!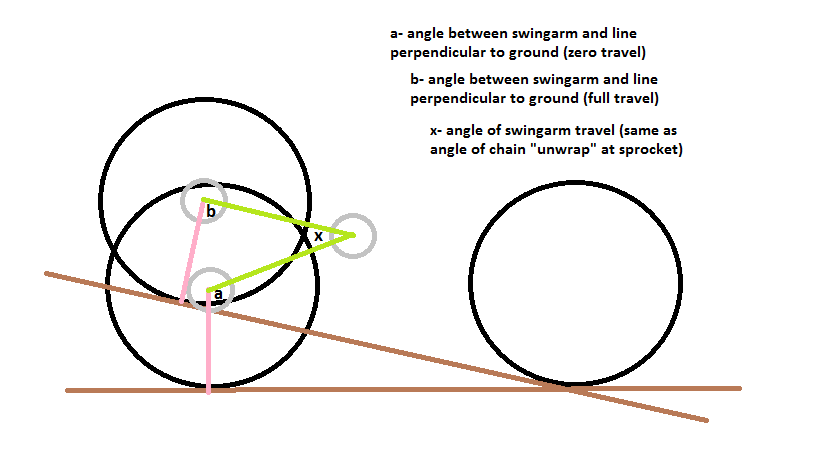
Help me to understand, is this right?:
angle a -angle b = anti-clockwise rotation of rear sprocket.
angle x = clockwise "wrapping" of chain around rear sprocket.
therefore, in this case; (a-b)+(-x)= chain "pull"/pedal kickback.
In this instance the answer is negative, therefore the under-run of the chain will be under tension.
No?
Yep I think this really is the relevant point. The pedal feedback should only be measured relative to the front triangle, seeing as any bump sharp enough to be a problem in terms of pedal feedback is going to rotate the bike/front triangle FORWARDS rather than backwards anyway.Linkage do both calculations. Relative to the front triangle and relative to the ground. But the graph only shows the rotation relative to the ground. Anyway, You can play with the frame by hand and read the two calculations... Turn off horizontal mode, bottom out the suspension and see what happens.
In a Superco Silencer for example, the Graph says 11º of pedal Kickback, but relative to the main triangle it's just 0.7º, and that's nothing.
Yep - after further consideration of the way Linkage calculates pedal feedback, I have come to the conclusion that it is more or less correct in terms of taking into account the relative deceleration of the rear wheel as it compresses. The reason I say "more or less" is because it assumes zero wheel mass (conservation of momentum principle means that if there is no force component externally acting on the bike, the front triangle/sprung mass have to accelerate forwards proportionally to how much the rear wheel accelerates in the opposite direction), and because it assumes the velocity of the sprung mass is the absolute reference point. However, if those two assumptions are valid (ie the error is insignificant, which it most likely is) then its calculation method is also correct, and I was wrong in what I said above; this was simply a factor I hadn't considered before. My point still stands about kickback only being measured relative to the front triangle though.Anyone any further thoughts on this?
Last edited:
So close to pulling the trigger on this for a sig quoteI was wrong

Just a joke, no logical retort needed.
haha, well next time you find someone else who'll publicly admit they were wrong, let me knowSo close to pulling the trigger on this for a sig quote
Just a joke, no logical retort needed.
")
I'm sure it was the most logical way out to minimize damage.haha, well next time you find someone else who'll publicly admit they were wrong, let me know
A lot of interesting points and thoughts in here, I've been writing about this stuff for over 10 years now, I think that I've been through everything here both on MTBR and on this board multiple times, so forgive me if I don't take the time to retype everything I've written, or respond to every point directly. I am too busy a) designing motorcycles and bikes, and b) going riding. I remember a big long thread on this a couple years ago where I basically gave up becuase nobody wanted to take the time to think about things, they just wanted to argue.
I'd like to sum up a couple things I felt were important:
1) anti-squat and pedal feedback are NOT directly proportional. Certainly there are designs that have very little anti-squat (even pro-squat) yet significant pedal feedback (My attempt at some level of political correctness requires that I shouldn't directly name these designs/ bikes but I am sure that some of the more dialed in monkeys or people who ride bikes and not just type on the internet know what I'm talking about) . dw-link is the opposite in that regard. A big reason for it's critical acclaim is that I've designed a system that allows for significant levels of anti-squat while carefully managing pedal feedback.
2) When you perceive pedal feedback, you are perceiving a change in acceleration / force at the pedals. Humans are terrible at perceiving distance changes or quantitative measurements, but great at perceiving accelerations / forces. I don't see anyone here really talking about that and I'm not going to take the time to search this forum for my past explanations today (going riding in 15 mins.) If someone else want's to dig it up I'd be happy to add it here. I feel that it's a pretty simple concept to understand at any rate.
3) There are multiple modes that one needs to consider to completely analyze internal chassis forces such as anti-squat, braking squat, and pedal feedback. I see that one or two of you realized that during the course of this discussion. Well done.
4) There are two internal chassis forces that make up anti squat; driving force (AKA swingarm force, impulson force) and chain force. Keeping in mind that the chain and wheel are part of the linkage system, the driving force is ALWAYS greater than chain pull force. Furthermore, it's an impossibility that they could ever be equal, as that would create a paradox. (chainline would need to pass through the rear axle center, making the sprocket pitch infinitely small, therefore it would have infinite force and need to be infinitely large to handle the forces involved) (and no, using an idler does not change this)
5) Pslide, if you are talking about my "ego" somehow assuming that I have one, need one, or even think that any of my work on these toys is worthy of any level of ego, I laughed. We have obviously never met.
6) Socket, nicely done my man, I think you've covered a good deal of it. Thanks also for the mention on the prior writings, I appreciate it. Regarding sharing measurements, I think that would be kind of silly of me, as I've got nothing to prove. My work is my proof, and I'm not trying to educate the competition in any way. I know many of the industry people that read this stuff and I've specifically gone out of my way to not let on too much over the years. In the early days I said too much for sure. I'll let the companies of the world keep analyzing my work and making their inferences from there.
7) Also for Socket, post #72. I think you are seeing some of the data that helped me realize the shape of the anti-squat curve that became the basis of dw-link. Obviously not just that, and for sure I see ways to improve, but hey that was 10 years ago basically.
8) When you look at bump forces and compare them to anti-squat forces, you'll realize that you would need to accelerate at an impossible rate to "lock out" the suspension during acceleration. Bump forces are almost always greater, with the notable exception being at very low speeds in the granny gear on steep grades over big square edges.
9) On the vast majority of bikes, if you are going to "feel" pedal feedback, it will be on the backside of a square edge, and it will feel like the pedals are falling away.
10) BB or idler concentric single pivots typically have this falling away feeling on the compression stroke.
11) Yes I am sure that it is possible to further clarify something that I've written above, to delve into some minutia, and I'm also sure that it's possible to have a 20 page thread from here about some semantics of what I've written, but it's probably not necessary.
Have a great day, I am going riding
Dave
I'd like to sum up a couple things I felt were important:
1) anti-squat and pedal feedback are NOT directly proportional. Certainly there are designs that have very little anti-squat (even pro-squat) yet significant pedal feedback (My attempt at some level of political correctness requires that I shouldn't directly name these designs/ bikes but I am sure that some of the more dialed in monkeys or people who ride bikes and not just type on the internet know what I'm talking about) . dw-link is the opposite in that regard. A big reason for it's critical acclaim is that I've designed a system that allows for significant levels of anti-squat while carefully managing pedal feedback.
2) When you perceive pedal feedback, you are perceiving a change in acceleration / force at the pedals. Humans are terrible at perceiving distance changes or quantitative measurements, but great at perceiving accelerations / forces. I don't see anyone here really talking about that and I'm not going to take the time to search this forum for my past explanations today (going riding in 15 mins.) If someone else want's to dig it up I'd be happy to add it here. I feel that it's a pretty simple concept to understand at any rate.
3) There are multiple modes that one needs to consider to completely analyze internal chassis forces such as anti-squat, braking squat, and pedal feedback. I see that one or two of you realized that during the course of this discussion. Well done.
4) There are two internal chassis forces that make up anti squat; driving force (AKA swingarm force, impulson force) and chain force. Keeping in mind that the chain and wheel are part of the linkage system, the driving force is ALWAYS greater than chain pull force. Furthermore, it's an impossibility that they could ever be equal, as that would create a paradox. (chainline would need to pass through the rear axle center, making the sprocket pitch infinitely small, therefore it would have infinite force and need to be infinitely large to handle the forces involved) (and no, using an idler does not change this)
5) Pslide, if you are talking about my "ego" somehow assuming that I have one, need one, or even think that any of my work on these toys is worthy of any level of ego, I laughed. We have obviously never met.
6) Socket, nicely done my man, I think you've covered a good deal of it. Thanks also for the mention on the prior writings, I appreciate it. Regarding sharing measurements, I think that would be kind of silly of me, as I've got nothing to prove. My work is my proof, and I'm not trying to educate the competition in any way. I know many of the industry people that read this stuff and I've specifically gone out of my way to not let on too much over the years. In the early days I said too much for sure. I'll let the companies of the world keep analyzing my work and making their inferences from there.
7) Also for Socket, post #72. I think you are seeing some of the data that helped me realize the shape of the anti-squat curve that became the basis of dw-link. Obviously not just that, and for sure I see ways to improve, but hey that was 10 years ago basically.
8) When you look at bump forces and compare them to anti-squat forces, you'll realize that you would need to accelerate at an impossible rate to "lock out" the suspension during acceleration. Bump forces are almost always greater, with the notable exception being at very low speeds in the granny gear on steep grades over big square edges.
9) On the vast majority of bikes, if you are going to "feel" pedal feedback, it will be on the backside of a square edge, and it will feel like the pedals are falling away.
10) BB or idler concentric single pivots typically have this falling away feeling on the compression stroke.
11) Yes I am sure that it is possible to further clarify something that I've written above, to delve into some minutia, and I'm also sure that it's possible to have a 20 page thread from here about some semantics of what I've written, but it's probably not necessary.
Have a great day, I am going riding
Dave
Last edited:
There is always room for improvement however, it's entirely possible that tomorrow someone (probably from NZ) will have a bright idea that makes it entirely possible to improve some of the existing compromises that have to be made.
Fixed for ya!There is always room for improvement however, it's entirely possible that tomorrow someone (probably from Scotland) will have a bright idea that makes it entirely possible to improve some of the existing compromises that have to be made.
There I fixed it also..There is always room for improvement however, it's entirely possible that tomorrow someone (probably from Edgartown, MA, USA) will have a bright idea that makes it entirely possible to improve some of the existing compromises that have to be made.
hahThanks dw.
A lot of great points there- I will have to go over them a few times to get my brain into gear! As a enthusiastic amateur, I love all this stuff, even if I have difficulty at times understanding it all.
You're right- you don't have to post here and educate the rest of us (as well as your competitors) which makes it great when you do post.
Anyway, enough sucking up- enjoy the ride (after all that's what it's all about!)
A lot of great points there- I will have to go over them a few times to get my brain into gear! As a enthusiastic amateur, I love all this stuff, even if I have difficulty at times understanding it all.
You're right- you don't have to post here and educate the rest of us (as well as your competitors) which makes it great when you do post.
Anyway, enough sucking up- enjoy the ride (after all that's what it's all about!)
I think that part is wrong. Driving force is always smaller than chain force. You would need a 22-40 gearing or somethig like that to have a DF greater than the chain force. I also think that in a standar design (no idlers, etc...) Anti-Squat and Pedal Kickback are pretty much proportional.A lot of interesting points and thoughts in here, I've been writing about this stuff for over 10 years now, I think that I've been through everything here both on MTBR and on this board multiple times, so forgive me if I don't take the time to retype everything I've written, or respond to every point directly. I am too busy a) designing motorcycles and bikes, and b) going riding. I remember a big long thread on this a couple years ago where I basically gave up becuase nobody wanted to take the time to think about things, they just wanted to argue.
I'd like to sum up a couple things I felt were important:
1) anti-squat and pedal feedback are NOT directly proportional. Certainly there are designs that have very little anti-squat (even pro-squat) yet significant pedal feedback (My attempt at some level of political correctness requires that I shouldn't directly name these designs/ bikes but I am sure that some of the more dialed in monkeys or people who ride bikes and not just type on the internet know what I'm talking about) . dw-link is the opposite in that regard. A big reason for it's critical acclaim is that I've designed a system that allows for significant levels of anti-squat while carefully managing pedal feedback.
2) When you perceive pedal feedback, you are perceiving a change in acceleration / force at the pedals. Humans are terrible at perceiving distance changes or quantitative measurements, but great at perceiving accelerations / forces. I don't see anyone here really talking about that and I'm not going to take the time to search this forum for my past explanations today (going riding in 15 mins.) If someone else want's to dig it up I'd be happy to add it here. I feel that it's a pretty simple concept to understand at any rate.
3) There are multiple modes that one needs to consider to completely analyze internal chassis forces such as anti-squat, braking squat, and pedal feedback. I see that one or two of you realized that during the course of this discussion. Well done.
4) There are two internal chassis forces that make up anti squat; driving force (AKA swingarm force, impulson force) and chain force. Keeping in mind that the chain and wheel are part of the linkage system, the driving force is ALWAYS greater than chain pull force. Furthermore, it's an impossibility that they could ever be equal, as that would create a paradox. (chainline would need to pass through the rear axle center, making the sprocket pitch infinitely small, therefore it would have infinite force and need to be infinitely large to handle the forces involved) (and no, using an idler does not change this)
5) Pslide, if you are talking about my "ego" somehow assuming that I have one, need one, or even think that any of my work on these toys is worthy of any level of ego, I laughed. We have obviously never met.
6) Socket, nicely done my man, I think you've covered a good deal of it. Thanks also for the mention on the prior writings, I appreciate it. Regarding sharing measurements, I think that would be kind of silly of me, as I've got nothing to prove. My work is my proof, and I'm not trying to educate the competition in any way. I know many of the industry people that read this stuff and I've specifically gone out of my way to not let on too much over the years. In the early days I said too much for sure. I'll let the companies of the world keep analyzing my work and making their inferences from there.
7) Also for Socket, post #72. I think you are seeing some of the data that helped me realize the shape of the anti-squat curve that became the basis of dw-link. Obviously not just that, and for sure I see ways to improve, but hey that was 10 years ago basically.
8) When you look at bump forces and compare them to anti-squat forces, you'll realize that you would need to accelerate at an impossible rate to "lock out" the suspension during acceleration. Bump forces are almost always greater, with the notable exception being at very low speeds in the granny gear on steep grades over big square edges.
9) On the vast majority of bikes, if you are going to "feel" pedal feedback, it will be on the backside of a square edge, and it will feel like the pedals are falling away.
10) BB or idler concentric single pivots typically have this falling away feeling on the compression stroke.
11) Yes I am sure that it is possible to further clarify something that I've written above, to delve into some minutia, and I'm also sure that it's possible to have a 20 page thread from here about some semantics of what I've written, but it's probably not necessary.
Have a great day, I am going riding
Dave


Edit: with a 22-40 Driving force would be similar to pedaling force, chain force is still greater than that...
Last edited:
I see what you're saying... but the effects of the driving force are moments, so when calculating anti squat there is a lever arm to take into account from the ground to the cg of the bike/rider, and from the center of the rear wheel to the IC, along with their horizontal distances from the center of wheel to the CG and IC. So you are right when you talk about force but maybe not the resulting anti squat calculations derived from these forces and bike geometry.I think that part is wrong. Driving force is always smaller than chain force. You would need a 22-40 gearing or somethig like that to have a DF greater than the chain force. I also think that in a standar design (no idlers, etc...) Anti-Squat and Pedal Kickback are pretty much proportional.
Edit: with a 22-40 Driving force would be similar to pedaling force, chain force is still greater than that...
P.S... this in only an initial reaction to your post, I have not done any calculations myself...
Vrock- I think this is wrong. Surely because the chain line to rear tyre contact point is ALWAYS longer than the swingarm (drive) line to rear tyre contact point, the driving force must always be larger. Is this diagram over-simplified? Am I wrong?I think that part is wrong. Driving force is always smaller than chain force. You would need a 22-40 gearing or somethig like that to have a DF greater than the chain force. I also think that in a standar design (no idlers, etc...) Anti-Squat and Pedal Kickback are pretty much proportional.
Edit: with a 22-40 Driving force would be similar to pedaling force, chain force is still greater than that...
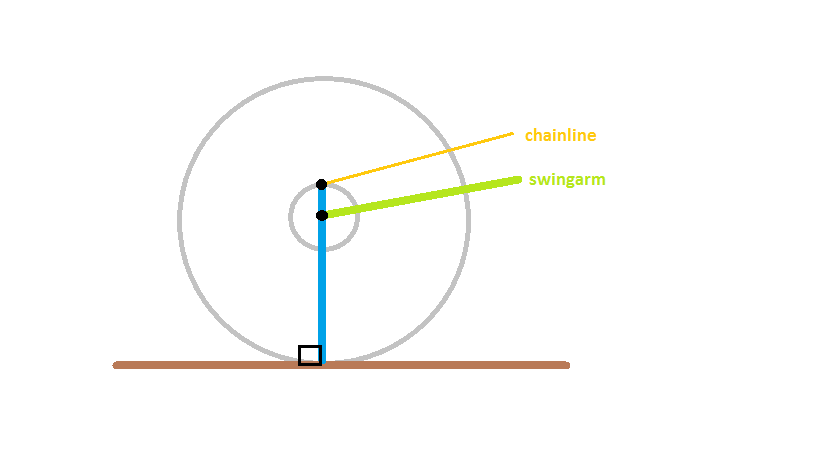
Also , I don't agree about pedal kickback/anti-squat being being proportional, because they are independent of each other. It is possible to get a high A-S throughout the range without too much pedal kickback. Although with many design A-S and PK do rise together, it doesn't mean that they are proportional to each other. For example, A-S is dependent on height of the COM, but pedal kickback isn't. Hope I am making sense.
I don't want to be oversimplifying in my response, and I'm not trying to offend you, but you are definitely 100% wrong on both points. Truescostman has explained it sufficiently as far as I'm concerned.I think that part is wrong. Driving force is always smaller than chain force. You would need a 22-40 gearing or somethig like that to have a DF greater than the chain force. I also think that in a standar design (no idlers, etc...) Anti-Squat and Pedal Kickback are pretty much proportional.
Edit: with a 22-40 Driving force would be similar to pedaling force, chain force is still greater than that...
Transition TR450.....58%....3.2º
Trek Session 99......62%....2.9º
Norco Aurum..........80%.....4.3º
Nuke Proof Scalp.....81%....6.4º
Evil Undead............ 109%....9.3º
Morewood Makulu.....102%....9.1º
Labyrinth Minotaur...116%....10.6º
Nicolai ION ST.........122%....10.0º
Commencal Supreme..138%...13.0º
Saracen Myst...........139%...13.7º
There is not a exact formula that relate Anti-Squat and Pedal Kickback, but they are "proportional", at least when we talk about Single Pivots, FSR, and Virtual Pivots with a "Flat" A-S graph. Bikes with a Steep A-S graph have about the same Kickback the beginning of the travel (small bumps) but the total Kickback is a bit lower and sometimes they reach it at mid travel...
Mondraker Summum.........87%....6.0º
Giant Glory.....................94%....5.6º
Cove Shocker................127%....7.7º
Banshee Legend.............149%...10.3º
Trek Session 99......62%....2.9º
Norco Aurum..........80%.....4.3º
Nuke Proof Scalp.....81%....6.4º
Evil Undead............ 109%....9.3º
Morewood Makulu.....102%....9.1º
Labyrinth Minotaur...116%....10.6º
Nicolai ION ST.........122%....10.0º
Commencal Supreme..138%...13.0º
Saracen Myst...........139%...13.7º
There is not a exact formula that relate Anti-Squat and Pedal Kickback, but they are "proportional", at least when we talk about Single Pivots, FSR, and Virtual Pivots with a "Flat" A-S graph. Bikes with a Steep A-S graph have about the same Kickback the beginning of the travel (small bumps) but the total Kickback is a bit lower and sometimes they reach it at mid travel...
Mondraker Summum.........87%....6.0º
Giant Glory.....................94%....5.6º
Cove Shocker................127%....7.7º
Banshee Legend.............149%...10.3º
I don't want to be oversimplifying in my response, and I'm not trying to offend you, but you are definitely 100% wrong on both points. Truescostman has explained it sufficiently as far as I'm concerned.
More Leverage = Less Force..... Sum of moments=0
Wheel Radius >> Rear Sprocket Radius.
Or maybe we are talking about different things...
There can't be an exact formula because all the variables are not shared. However, I agree that for most suspension designs there is dependence.There is not a exact formula that relate Anti-Squat and Pedal Kickback, but they are "proportional", at least when we talk about Single Pivots, FSR, and Virtual Pivots with a "Flat" A-S graph. Bikes with a Steep A-S graph have about the same Kickback the beginning of the travel (small bumps) but the total Kickback is a bit lower and sometimes they reach it at mid travel...
More Leverage = Less Force....Sum of moments=0More Leverage = Less Force..... Sum of moments=0
Wheel Radius >> Rear Sprocket Radius.
Or maybe we are talking about different things...
1/2 Wheel Radius<<1/2 Wheel Radius+1/2 Sprocket Radius.
Think of the rear wheel and sprocket at that instant being one long lever at right angles to the tyre contact point. The chain force is a larger lever than the driving force. therefore chain force has less force than the driving force.
I don't think you can say they are "dependent" or "proportional". They maybe "share a trend" but as you say they are independent as they do not share variables.There can't be an exact formula because all the variables are not shared. However, I agree that for most suspension designs there is dependence.
It's a nomenclature issue - there isn't really a well-defined name for what DW refers to as "driving force". This is the force that acts on the AXLE, which is the vector sum of the tractive force (at the tyre) and the chain force (at the cog). Basically, if you sum moments about the contact patch of the tyre, you have two moment arms - one from axle to contact patch, and one from the top of the cog to the contact patch. The moment arm (lever) from contact patch to the top of the cog is always the larger of the two, which means that whatever tension force the chain is applying, the "reaction" force at the axle (the "driving force" DW refers to) has to be larger in order for the moments to balance out.More Leverage = Less Force..... Sum of moments=0
Wheel Radius >> Rear Sprocket Radius.
Or maybe we are talking about different things...
I personally prefer the term "impulsion force", but then again, impulsion implies impellers..
Yeah I agree, it's a weird term to use. I would say that "driving force" should be the force that actually drives you forwards, which yeah would be the tractive force at the tyre... but anyway nomenclature aside, that's what DW meant. Took me a long time to work out what he was on about tooThe force at the axle is the biggest of the three, that make sense, but that's not the driving force. Tony Foale, Cossalter and everyone else calls Driving Force to the force at the tire.
This is the design i have been working on
On paper i should i get 100% anti-squat(thru all the travel) with zero chain extension and active braking.
The cc is at the center of the alfine hub.
Also the CC(center of curvature) is mid-point from the ground to the COM of standing rider.
My calculation:
traction force at the ground X distance to the CC= a force in "y" axis at the center of the alfine hub the will counter anti-clockwise rotation of the rider accelerating.(kind of pulling "up" with a hook a the main pivot)
Further theory that i would like to validate is this "y" force will counter the bobing force of the rider.
This bike will be kind of a lab on wheels.
On paper i should i get 100% anti-squat(thru all the travel) with zero chain extension and active braking.
The cc is at the center of the alfine hub.
Also the CC(center of curvature) is mid-point from the ground to the COM of standing rider.
My calculation:
traction force at the ground X distance to the CC= a force in "y" axis at the center of the alfine hub the will counter anti-clockwise rotation of the rider accelerating.(kind of pulling "up" with a hook a the main pivot)
Further theory that i would like to validate is this "y" force will counter the bobing force of the rider.
This bike will be kind of a lab on wheels.
Attachments
-
 229.2 KB Views: 348
229.2 KB Views: 348
Last edited:
Sorry rbx, I think that some of your calculations are wrong.This is the design i have been working on
On paper i should i get 100% anti-squat(thru all the travel) with zero chain extension and active braking.
The cc is at the center of the alfine hub.
Also the CC(center of curvature) is mid-point from the ground to the COM of standing rider.
My calculation:
traction force at the ground X distance to the CC= a force in "y" axis at the center of the alfine hub the will counter anti-clockwise rotation of the rider accelerating.(kind of pulling "up" with a hook a the main pivot)
Further theory that i would like to validate is this "y" force will counter the bobing force of the rider.
This bike will be kind of a lab on wheels.
You won't get 100% Anti-Squat with this design- the jackshaft would need to be even higher. The 100% Anti-Squat line would be from the rear tyre contact point PARALLEL to the swingarms/chainline (since the meeting point is at infinity) and by my estimation would only give you around 60% A-S at zero travel.
It is, however, a neat way of getting a pivot effectively concentric with the Alfine without the width/mounting problems and getting more active braking than with a single pivot.
Sorry to be the bearer of bad news!

Last edited:
This what i initially thought but i was thinking that since the front a and rear sprockets are the same size(the chain line force passes tru the main pivot so no moment is created)Sorry rbx, I think that some of your calculations are wrong.
You won't get 100% Anti-Squat with this design- the jackshaft would need to be even higher. The 100% Anti-Squat line would be from the rear tyre contact point PARALLEL to the swingarms/chainline (since the meeting point is at infinity) and by my estimation would only give you around 60% A-S at zero travel.
It is, however, a neat way of getting a pivot effectively concentric with the Alfine without the width/mounting problems and getting more active braking than with a single pivot.
Sorry to be the bearer of bad news!
Then the greater force becomes the ground tire contact point(parallel to ground).
I think the traditional way of calculating AS(a la linkage) does not apply here.
or i might be way off
Sweet design RBX. I've toyed with drawings like that(different shock set up). I actually prefer a brake squat now, not by much, and both have merits.
Will your top swingarm be the main one? As you can fit wider bearings.
Get er done.
Will your top swingarm be the main one? As you can fit wider bearings.
Get er done.
-
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.